|
|
|
解决方案
本文讨论了一种为要设计的光学系统选择初始系统的方法,基于使用启发式规则来规范化和概括物镜开发者的体验。 本文给出了设计物镜过程的例子。
当前,计算机技术广泛用于包括光学仪器在内的各个科学和工程领域,,没有计算机技术就无法使用现代专业软件(SARO,OPAL,SYNOPSYS,CODE V,ZEMAX等)。 但是,现有软件无法为用户提供自动选择设计过程的初始系统。 本文讨论了解决此问题的一种方法。
设计光学系统的一般过程包括以下阶段:
1.分析技术任务,
2.选择初始系统(结构组合)
3.确定系统参数(参数组合)
4.评估成像质量和光学系统的其他参数
5.创建一个评估函数,
6.优化光学系统的参数,
7.评估最终的光学系统是否满足技术任务(如果不满足要求,则返回到步骤2),
8.计算容差,
9.制作技术文档。
在现阶段,步骤1、2、5和7由开发人员完成。其他阶段已经实现了很大程度的自动化。因此,剩余部分的自动化将大大提高开发过程的效率。
了解光学计算工程师能够从计算机中获得什么信息是非常重要的,如今,普通用户访问的大多数系统都符合光学系统发展对计算机的要求,例如低成本,使用方便,大量的图形功能,高精度和高速计算功能。
时常会有人提出开发人员的存在是否会变得多余的问题。这个问题第一次被提出来是在光学系统的自动设计程序开始付诸实践的时候。程序能够通过使得定义的评估函数最小化,提供接近最佳配置的光学系统,评价函数通常表示为所选像差值的平方和。
在n维空间中(其中n是光学系统配置参数的变量数),任务简化为使用评价函数的最小值。 然而,事实证明,任何复杂系统都会有许多的局部最小值,甚至简单的系统也会有一些最小值。 因此,在开发的早期阶段成功地选择初始系统将会大大缩短总体规划时间。 在设计物镜时,选择初始系统的方法包括一些主要的阶段:物镜分类,结构组合和参数组合的形成过程。
物镜的分类在参考文献1-3中给出。参考文献2和4中给出结构组合过程。使用专门的软件5,6进行完成参数组合。
光学系统最一般的分类(关于对象和图像的位置)包括四类系统:望远镜,显微镜,转置镜头和相机镜头。 本文只考虑相机镜头。物镜分类如图1所示,光学系统的开发包括以下特性:相对孔径,视场,焦距,光谱范围,图像质量,光圈位置,后焦距,入瞳的位置。

每种类型有七个明显的特征量:J是系统的速度,W是视场,F是焦距,L是消色差范围,Q是图像质量(像差校正度),S是后焦距,D是入瞳位置。 每个特征的所有可能值分为三个范围,如下所示:
1. 系统速度J:范围0:相对孔径小于1:2.8; 范围1:相对孔径在1:2.8至1:1.5; 范围2:相对孔径大于1:1.5。
2.视场W:范围0:最大15°; 范围1:15°到60°; 范围2:大于60°。
3.焦距F:范围0:小于50mm; 范围1:50至100mm; 范围2:大于100mm。
4.消色差范围L:范围0:单色; 范围1:工作波长间隔为2.5至100 nm;范围2:间隔大于100 nm。
5.图像质量Q:范围0:几何限制; 范围1:中等图像质量; 范围2:衍射图质量。
6.后焦距S:范围0:小于物镜焦距的一半; 范围1:物镜的焦距的一半至物镜的焦距; 范围2:超出物镜的焦距。
7.入瞳的位置D:范围0:在物镜内;范围1:在物镜后表面之后;范围2:在物镜的第一面之前。
因此,单个物镜的类别由这些特征值的范围组合决定。所以,物镜可以分类为37 = 2187个类别。 分类指标的总和决定了其整体阶段的复杂性:总和越大,找到问题的解决方案就越困难。复杂程度的可能值从0到14,因此,光学系统的复杂程度从6到11可以认为是复杂的,当大于11时认为是特别复杂。
通过上述提议的方法来找到一个物镜分类的例子,考虑建立一个物镜布局的技术任务的典型方法。 需要指出的是,按照提议的分类,技术任务的特征值的数值指标可以直接过渡到一个物镜的具体分类。
第一个例子:要求设计一个物镜满足以下要求:F = 4.5 mm;W = 84°;J= 1:1.8;S = 5.5mm; 入瞳位于系统内部;工作波长是490、546.1和643.9 nm; 并且图像质量受到几何限制。 在本例中将寻找一种具有以下特征范围索引的类:J = 1,W = 2,F = 0,L = 2,Q = 0,S = 2和D = 0。 该光学系统的分类复杂度在此处被视为7,表示该系统属于复杂系统的等级。
第二个例子:要求设计一个物镜满足以下要求:F = 8 mm;W = 45°;J = 1:1.27;S = 6mm; 位于入瞳之前;工作波长是490、546.1和643.9 nm;并且图像质量受到几何限制。 所以,在本例中将寻找一种具有以下特征范围索引的类:J = 1,W = 1,F = 0,L = 2,Q = 0,S = 1和D= 2。该光学系统的分类复杂度在此处被视为7,表示该系统属于复杂系统的等级。
结构组合过程的形式化意味着将使用一组启发式规则来建立技术任务和要求之间的相互联系,物镜的分类和组件集。
选择具有已知特性的光学元件作为组件,并提出用不会引入绝对像差的曲面来组成光学元素。相应的理论由Rusinov7和Shafer8提出。该理论指出,光学界面的发展以一个称为基础元素的元素开始。通过引入必要的校正元进一步开发界面。该理论已在Anitropova,2,6,9发表的论文中被延伸,区分两种其他类型的光学元件:“广角”和“快速”,用于建立物镜的视场及其相对孔径。有人提议通过以下拉丁字母方式指定具有已知光学特性的表面,即:O表示平面,P表示入瞳的中心,A为非平面,F为焦点的中心,I代表近焦表面2。还提出了光学布局中指定表面的相对位置用以下符号表示:“(”表示表面在从物体到孔径光阑之间的空间位置,“)”表示靠近孔径光阑的位置,“ /”表示近焦区域。具有已知特性的光学元件清单目前包括41个元素,包括6个基本元素,8个广角元素,十五个快速元素和十二个校正元素。
在开发光学系统布局的过程中,当需要考虑光学布局中需要用什么光学元件以及它们需要放置在什么位置时,光学设计师通常根据自己的经验决定。在Anitropov的论文中,制定了一套规则来决定光学元件在一般分类物镜中不同区域的稳定度,并确定了他们的位置。给定的启发式规则可以建立与技术任务相对应的光学元件的过程。所示规则后来被表述为逻辑表达式,特别是写在关系数据库中。结构组合的一般过程被确定为一种使用给定的分类和启发式规则为基础而形成的算法。基于给定的算法,测试软件允许用户指定所需的物镜的类别,由此给用户提供有关选择光学系统的结构布局的初始系统的建议。当然,所发布的解决方案的数量和质量直接取决于启发式基础规则的完整性。需要指出的是,结构形式不包含有关光学元件材料的属性信息。专家对此提出经验规则:建议对于具有正聚焦能力的元件使用冕牌玻璃,对于具有负聚焦能力的元件使用火石玻璃。
让我们扩展对第一个示例的处理。 用来说明物镜类别(J = 1,W = 2,F = 0,L = 2,Q = 0,S = 2,D = 0),在测试过程中获得了以下的结构形式:S (AP(+ K (PP (+ B) AP )+ C) AP + K) PP),它包含关光学系统结构的以下信息:
元素1(广角):第一个表面是非平面的,第二个与入瞳的中心同轴,两个表面均位于孔径光阑之前。
元素2(校正):两个表面入瞳的中心同轴,并放置在孔径光阑之前。
元素3(基本):第一个表面是非平面的,第二个是与入瞳的中心同轴,两个面都靠近孔径光阑。
元素4(快速):第一个表面是非平面的,第二个是与入瞳的中心同轴,两个面都靠近孔径光阑。
元素5(校正):两个面都与入瞳的中心同轴,并且都靠近孔径光阑。
让我们扩展第二个示例的处理。用来说明物镜类别(J = 1,W = 1,F = 0,L = 2,Q = 0,S = 1,D = 2),在测试过程中获得了以下的结构形式:B) AP + K )PP + C) AP,它包含关光学系统结构的以下信息:
元素1(基本):第一个面是非平面的,第二个面是与入瞳的中心同轴,两个面都靠近孔径光阑。
元素2(校正):两个面都与入瞳的中心同轴,并靠近孔径光阑。
元素3(快速):第一个表面是非平面的,第二个面与入瞳的中心同轴,两个面都靠近孔径光阑。
从上面的描述可以看出,结构公式包含有关数字,相互放置,以及光学元件的表面类型的信息。 因此,为了从技术任务中得到参数组成,光学系统设计者需要初始系统的结构式—依据其进一步计算和优化的可能性决定优化系统的指定参数。
在参数合成阶段,从表面特性,决定表面的半径和它们之间的距离到光学材料。为此,使用光学系统设计软件会很方便,例如,SYNOPSYS5程序(在开发网站上可以获得一个免费演示版)。
应该指出的是,之所以从可用于设计光学系统的那些软件中选择所指示的软件,是因为该软件知道它们属性后可以自动计算表面的半径,从已知的玻璃库中选择具体的玻璃种类(例如肖特,大原,康宁玻璃等),并且在技术任务的要求下通过把指定的自由参数设为变量来自动校正指定的参数。
在前面给出的示例中,自由参数是光学元件的厚度,它们之间的距离以及特定的光学材料。 元件表面的半径由其属性决定,并且自动计算。 指定的表面类型通过使用SYNOPSYS根据所选示例的结构布局给出。通过光阑的要求值和焦距来决定元件之间的距离。 然后选择材料:F1型玻璃被选为负焦元件,K8玻璃作为正焦元件。 元件的主要参数和性能给出之后,基于软件给出的结构布局,就可以得到一个指定的光学系统。
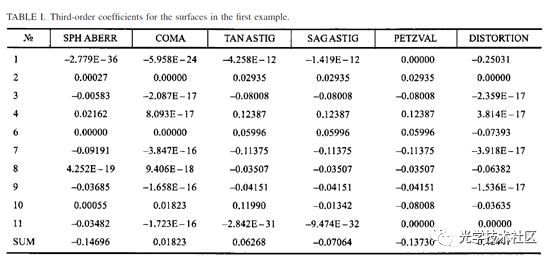
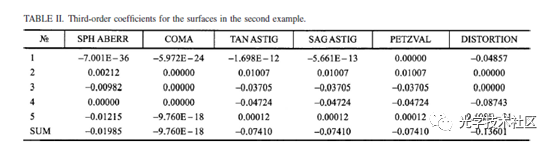
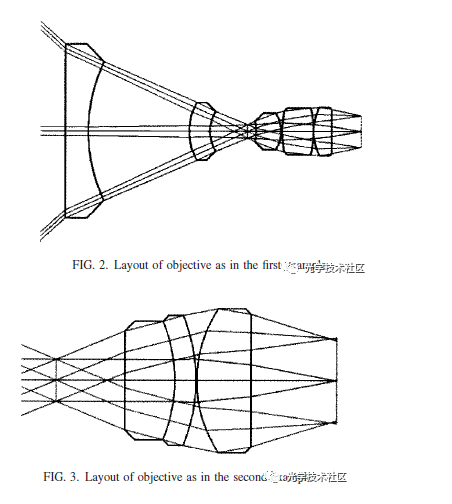
作为基于前面提到的示例的参数组合的结果,得到了满足技术任务所有指标的系统,表I和II展示了表面的第三阶系数值,图2和3表示最终的物镜的光学布局。
本文展示了一个选择物镜初始结构的过程的例子,通过比较结果与现有的专利和科学文献中的类似解决方案,可以得出结论,指定的技术方法是可行的并且与现有的类似的光学系统在光学元件的数量上相一致。需要指出的是,在优化过程中该技术在许多情况下具有更快的收敛性。 提议的方法限制了在布局中出现冗余元件,因为将下一个元件引入布局取决于其功能和目的。
这种方法的一个重要优点是可以考虑实时布局的大量版本。
1I. L. Anitropova, “Training in principles of synthesis and composition of optical systems at the level of qualification promotion,” Proc. SPIE 1603,329 1992.
2I. L. Anitropova and G. L. Golovanevski, “System of heuristic synthesisof optical systems,” Preprint IPM AN SSSR 31, Moscow, 1990.
3I. L. Livshits and A. V. Sal’nikov, “Classification of optical systems suitablefor the organization of databases,” in Abstracts of International Conference Optika-99, St. Petersburg, 1999.
4I. L. Anitropova, “Formalizing the heuristic synthesis procedure in lensdesign,” in OSA Proceedings of the International Optical Design Conf.Rochester, USA, June 1994.
5D. C. Dilworth, “SYNOPSYS, version 11,” user manual, 2005.
6I. L. Anitropova, “Simple method for computer-aided lens design with theelements of artificial intelligence,” Proc. SPIE 1780, 210 1993.7M. M. Rusinov, Technical Optics Mashinostroenie, Leningrad, 1979.
8D. Shafer, “Simple method for designing lenses,” Proc. SPIE 237, 2341980.
9I. L. Anitropova and V. E. Pryanichnikov, “Planning basic optical modules,”Preprint IPM AN SSSR 43, Moscow, 1987.
更多资料请查看 SYNOPSYS™ 官网: http://osdoptics.com.cn/macros.php
ASAP/APEX技术交流群 373021576
SYNOPSYS光学设计与优化交流群 965722997
RP激光软件交流群 302099202
武汉墨光科技有限公司
友情链接
Copyright © 2012-2021 武汉墨光科技有限公司版权所有
许可证:鄂ICP备17024342号-1